| ホーム |
スポンサーサイト
上記の広告は1ヶ月以上更新のないブログに表示されています。
新しい記事を書く事で広告が消せます。
新しい記事を書く事で広告が消せます。
全自作(仮名)ドールの骨格
既に見えなくなっってしまっている骨格について書いておこう。
以前の記事で書いたように骨格はイレクターパイプを使っている。
ご存知の方も多いだろうが、金属パイプをAAS樹脂(間違われ易いが、塩ビではない)でコーティングしたとても頑丈な素材だ。
ただドールの骨格に使うには、関節に使う可変ジョイントが、強度や可動範囲的に問題がある。
まあジョイントはちょっとした金属加工で自作すればいいのだが、出張先での事だったので、普通にイレクタージョイントを使用した。
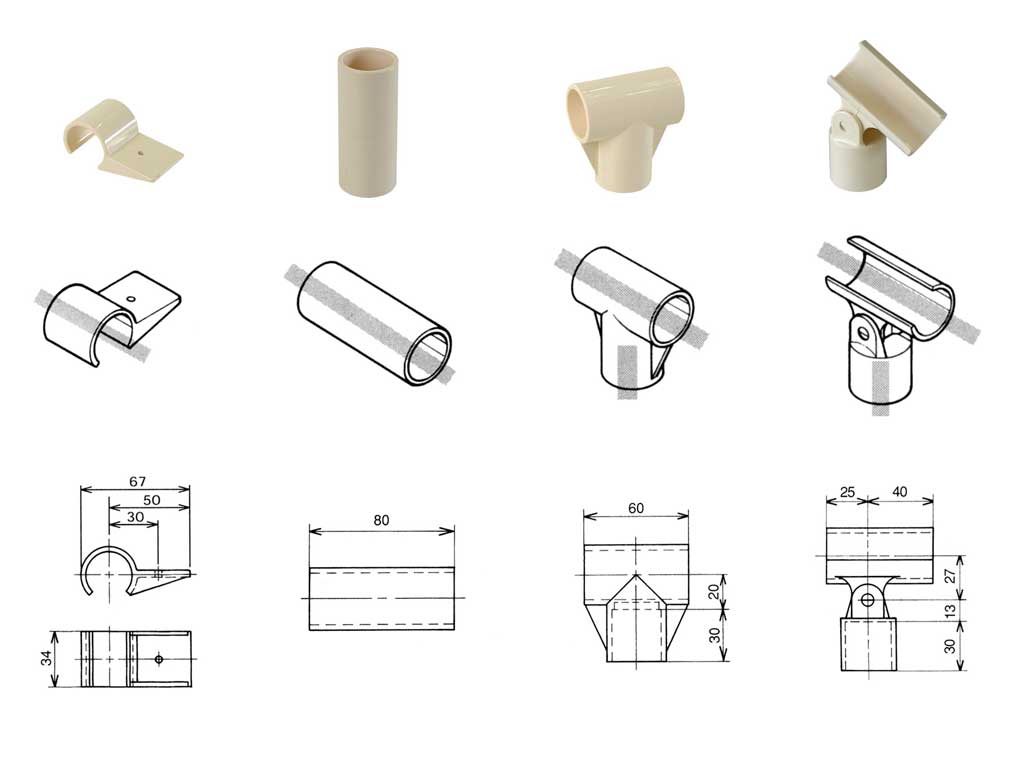
使用したジョイントは以下である。
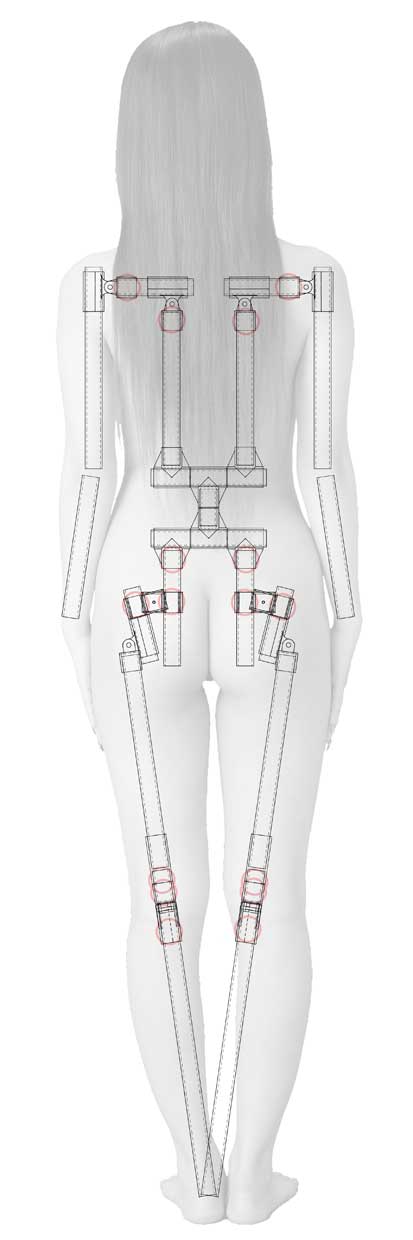
こちらは骨格を簡単に図面にしてみた。

赤丸の部分のみ接着している。
内部でジョイントからパイプが抜けないギリギリの接着箇所に収めるのがポイントだ。
図面に起こすと足先が交差してしまっているが、大腿骨の付け根(腰の部分)が2軸と、ヒザ上部分が回転することによって実質3軸で動き、自由自在な動きが出来る。
この辺は動きは今度動画に撮ってアップしよう。
この大腿骨の付け根部分に関しては角度(内股になる方向)をつけるためにジョイント同士を接着してボルトでつなぐ、イレギュラーな使い方をしている。
腰は前後(腹筋、背筋運動)方向には2軸で動く。
ツイスト運動方向にも動く。
残念ながら正面から見て、体をくの字にする動きは出来ない。
まあそれは骨格模型ドールのほうで実現予定だ。
骨格に関してもまだまだ様々なポイントがあるのだが、また折に触れて解説していく。
以前の記事で書いたように骨格はイレクターパイプを使っている。
ご存知の方も多いだろうが、金属パイプをAAS樹脂(間違われ易いが、塩ビではない)でコーティングしたとても頑丈な素材だ。
ただドールの骨格に使うには、関節に使う可変ジョイントが、強度や可動範囲的に問題がある。
まあジョイントはちょっとした金属加工で自作すればいいのだが、出張先での事だったので、普通にイレクタージョイントを使用した。
使用したジョイントは以下である。
こちらは骨格を簡単に図面にしてみた。
赤丸の部分のみ接着している。
内部でジョイントからパイプが抜けないギリギリの接着箇所に収めるのがポイントだ。
図面に起こすと足先が交差してしまっているが、大腿骨の付け根(腰の部分)が2軸と、ヒザ上部分が回転することによって実質3軸で動き、自由自在な動きが出来る。
この辺は動きは今度動画に撮ってアップしよう。
この大腿骨の付け根部分に関しては角度(内股になる方向)をつけるためにジョイント同士を接着してボルトでつなぐ、イレギュラーな使い方をしている。
腰は前後(腹筋、背筋運動)方向には2軸で動く。
ツイスト運動方向にも動く。
残念ながら正面から見て、体をくの字にする動きは出来ない。
まあそれは骨格模型ドールのほうで実現予定だ。
骨格に関してもまだまだ様々なポイントがあるのだが、また折に触れて解説していく。
| ホーム |

